Шаговый двигатель: как он изменил мир, делая 200 шагов за один оборот
*Мы стремимся делать наши статьи максимально полезными. Если Вам не хватило какой-то информации, оставьте комментарий, мы дополним материал!
Революция в цифровой автоматизации началась не с искусственного интеллекта и не с облачных вычислений, а с простого электромеханического преобразователя, способного разбивать непрерывное вращение на фиксированные, предсказуемые углы. Среди современных электродвигателей именно шаговый двигатель стал фундаментом современной мехатроники, позволив перевести цифровые команды микроконтроллеров в точные механические перемещения без сложной калибровки. В технических статьях и инженерных руководствах лучшие решения часто сводятся к простоте архитектуры. Его способность выполнять ровно 200 шагов за один оборот оказалась не просто характеристикой, а точкой бифуркации, после которой массовое производство точного оборудования стало экономически оправданным. От настольных систем до промышленных дозаторов эта технология обеспечила баланс между точностью, надёжностью и стоимостью.
Введение: чем шаговый двигатель отличается от всех остальных
В мире электромеханики большинство машин спроектированы для создания непрерывного вращения. Шаговый двигатель работает по иной логике: он преобразует электрические импульсы в дискретные угловые перемещения, где каждый входящий сигнал соответствует фиксированному повороту вала. Это фундаментальное отличие определяет архитектуру всей системы управления. Вместо плавного регулирования напряжения, как в асинхронных машинах, шаговый двигатель требует точного фазирования обмоток. Система не измеряет, где находится вал, она точно знает, куда его нужно переместить, и гарантирует это при условии корректного расчёта механики и электрики.
Отсутствие обратной связи — не баг, а архитектурное решение
В инженерной культуре принято считать, что точная система обязана иметь замкнутый контур (closed loop). Шаговый двигатель ломает эту парадигму, доказывая, что открытое управление может быть осознанным выбором. Конструкция гибридного шаговика спроектирована так, что при соблюдении расчётного момента вероятность рассинхронизации стремится к нулю. Это устраняет необходимость в энкодерах, что радикально упрощает схемотехнику и снижает стоимость. Для производителей оборудования это означает сокращение точек отказа, связанных с калибровкой и обработкой сигналов. Такие решения распространены в самых разных отраслях, где нагрузка предсказуема, а кинематика жёсткая. Открытый контур обеспечивает детерминированное поведение: каждый импульс всегда приводит к одному угловому смещению.
Дискретность вместо плавности: почему это удобно для цифрового управления
Цифровые контроллеры оперируют бинарными состояниями и дискретными интервалами. Шаговый двигатель идеально соответствует этой логике, становясь естественным звеном в цепочке микропроцессор-драйвер-механика. Формирование координат в G-коде или прошивке 3D-принтера сводится к подсчёту импульсов. Это исключает необходимость реализации сложных алгоритмов интерполяции. Электроника управления получает чёткие данные для формирования траекторий, а пример интеграции с платформой Arduino наглядно показывает, как просто организовать движение. Каждый шаг соответствует физическому перемещению, которое легко масштабируется через передаточное отношение винтов или ремней. Дискретность позволяет строить точные профили ускорения и синхронизировать несколько осей без фазовых сдвигов.
200 шагов на оборот — откуда взялся стандарт 1.8 градуса
Стандарт шагового двигателя в 200 полных шагов сформировался в результате поиска баланса между электромагнитной эффективностью и механической реализуемостью. Гибридный двигатель использует ротор с постоянными магнитами, где число зубьев обычно кратно пятидесяти. При шаге 1.8 градуса ротор и статор взаимодействуют так, что магнитное поле последовательно захватывает следующую позицию. Зубцы на статоре и роторе конструктивно выполнены из магнитомягкого материала, а расположение катушек на противоположных полюсах позволяет разделить магнитный поток на отдельные секции. В случае гибридной конструкции эти элементы довольно успешно сочетают преимущества двух технологий. Соответственно, примеры промышленного применения подтверждают, что 1.8 градуса стал индустриальным компромиссом, обеспечивающим высокую точность без избыточного гистерезиса.
Типы шаговых двигателей и параметры выбора
Рынок шаговых двигателей структурирован вокруг трёх базовых технологий. Существует униполярный и биполярный мотор, а также конструкции переменного магнитного сопротивления. Выбор конкретного исполнения определяется строгим соответствием электрических параметров требованиям драйвера. Рассмотрим их особенности подробнее.
Гибридные шаговые двигатели (NEMA 8, 11, 14, 17, 23, 34) — от миниатюрных до тяжёлых
Классификация по стандартам NEMA определяет не рабочие характеристики, а геометрические посадочные размеры. Эта стандартизация критична для взаимозаменяемости. NEMA 8 и 11 применяются в микропозиционерах, где приоритетом являются габариты. NEMA 17 стал отраслевым стандартом для потребительской печати благодаря оптимальному соотношению момента к массе. Дополнительные модификации могут иметь разное число выводов для подключения. В зависимости от схемы соединения проводов, можно подать питание по разным конфигурациям. Для тяжёлых задач подходят модели с большим количеством полюсов. В любом случае, выбор размера диктует требования к охлаждению, а способы монтажа остаются унифицированными.
Ток фазы, момент удержания и индуктивность — что реально важно
Номинальный ток фазы определяет тепловую нагрузку и требования к силовой части драйвера. Интенсивность тока напрямую влияет на величину крутящего момента. Момент удержания указывается для статического режима и показывает максимальное внешнее усилие, которое система способна компенсировать. Однако динамический момент всегда ниже и зависит от профиля движения. Индуктивность обмоток часто игнорируется новичками, но именно она определяет, как быстро электропривода реагируют на команды. Некоторые производители указывают дополнительные параметры, такие как срок службы подшипников, что помогает точнее спрогнозировать ресурс. Низкоиндуктивные двигатели быстрее реагируют, но требуют источников с более высоким напряжением.
Зависимость момента от скорости: почему на высоких оборотах шаговик слабеет
Кривая момента нелинейна и имеет выраженный спад с ростом частоты шагов. Это физическое ограничение особенно заметно в середине рабочего диапазона скоростей. С увеличением скорости сокращается время, доступное для завершения переходного процесса нарастания тока. Ток не успевает достичь номинала до следующей коммутации, что напрямую снижает магнитный поток. Драйверы с повышающим напряжением пытаются компенсировать этот эффект, форсируя ток на фронте импульса, но фундаментальный предел остаётся. Именно поэтому системы проектируются с учётом рабочего диапазона, а ускорения подбираются так, чтобы мотор оставался в зоне достаточного момента на всём протяжении траектории.
Применение шаговых двигателей: где они незаменимы сегодня
Технологическая ниша шаговых двигателей сформировалась вокруг задач, где требуется повторяемое позиционирование с умеренной динамикой. Их доминирование обусловлено не отсутствием альтерентив, а экономической целесообразностью и зрелостью экосистемы.
3D-принтеры: точное позиционирование головы и стола за копейки
Аддитивные технологии стали массовыми именно благодаря шаговым двигателям. В области 3D-печати эти приводы обеспечивают перемещение экструдера с точностью, достаточной для формирования слоёв толщиной от 50 до 300 микрон. Микрошаговые контроллеры сглаживают движение, минимизируя артефакты. Ременная передача в связке с NEMA 17 создаёт систему, способную развивать высокие ускорения. Стоимость приводных блоков составляет доли процента от финальной цены товаров, что делает технологию доступной для домашнего использования, сохраняя при этом инженерную надёжность.
Станки с ЧПУ (фрезеры, лазеры, плоттеры): дешёвая система координат
В сегменте хоббийных и полупрофессиональных центров шаговые двигатели формируют координатную сетку. Для фрезеровки мягких металлов и дерева их точности более чем достаточно. В лазерных системах шговые двигатели управляют позиционированием головки при гравировке, где важна не скорость, а стабильность траектории. Плоттеры используют аналогичную архитектуру для точной подачи рулонных материалов. Открытый контур управления упрощает интеграцию с популярными платами контроллеров, снижая порог входа для разработчиков.
Роботизированные манипуляторы: когда нужна повторяемость
В автоматизированных сборочных линиях шаговые двигатели применяются там, где важна высокая повторяемость. Декартовые узлы на шаговой базе обеспечивают позиционирование с погрешностью в пределах десятков микрон. Отсутствие необходимости в калибровке энкодеров после каждого включения ускоряет запуск. В системах машинного зрения шаговые двигатели перемещают камеры по задаваемым траекториям, гарантируя, что каждая съёмка выполняется из идентичного положения.
Медицинские насосы и аналитическое оборудование — шаг в микроны
В медицинской технике шаговые двигатели управляют насосами, дозирующими препараты. Точность перемещения поршня напрямую конвертируется в объём среды, а дискретная природа шагов позволяет программировать сложные профили подачи. Гибкие трубки перистальтических механизмов работают в паре с цилиндрическими роторами, обеспечивая стерильность. Требования к низкому уровню шума делают гибридные приводы оптимальным выбором, так как они устойчивы к воздействию химических паров.
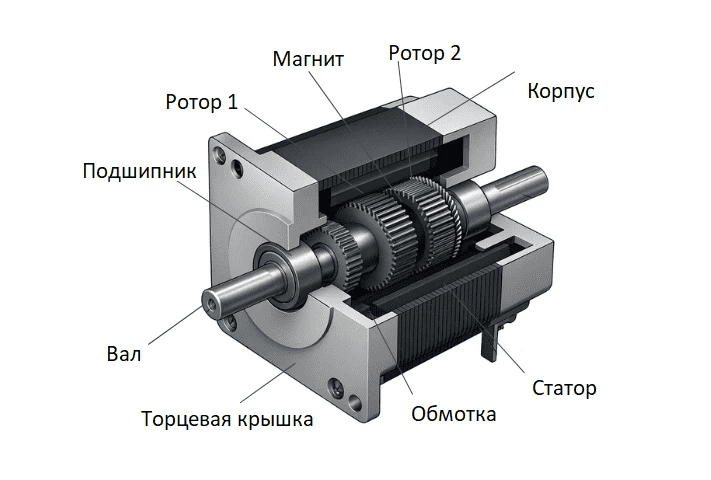
Устройство шагового двигателя: статор, ротор и магнитный поток
Эффективность шагового двигателя определяется точностью электромагнитного проектирования. Внутренняя структура машины подчиняется законам магнитостатики, где каждый элемент выполняет строго определённую функцию в цепи преобразования энергии.
Зубчатая структура — геометрия, которая запрещает скользить
Сердце гибридного шагового двигателя представляет собой многослойную конструкцию ротора, смещённого на половину шага, и кольцевого магнита между пакетами. Статор имеет аналогичную конфигурацию с обмотками в пазах. При подаче тока создаётся поле, которое стремится выровнять элементы, минимизируя сопротивление цепи. Эта геометрия создаёт множество стабильных позиций равновесия. Зубчатая структура обеспечивает магнитный стопор, который позволяет зафиксировать вал даже при отключённом питании.
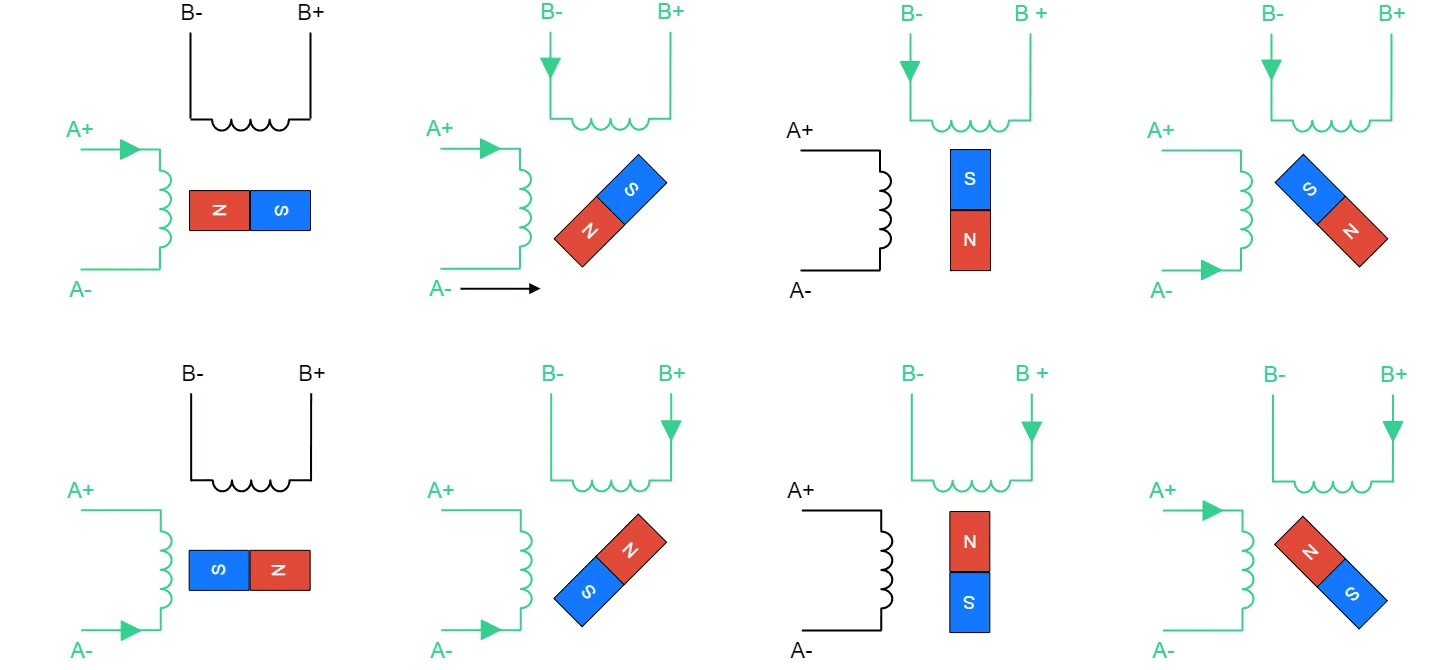
Почему шаговый двигатель вращается строго на фиксированный угол
Вращение обеспечивается последовательным переключением фаз, которое создаёт бегущее магнитное поле. Каждый импульс смещает вектор индукции, заставляя ротор поворачиваться вслед за ним. Угол шага математически определяется количеством зубьев и схемой коммутации. В двухфазном двигателе стандартная последовательность обеспечивает полный цикл за четыре шага, что даёт ровно 200 позиций на 360 градусов. Контроллер управляет этим процессом через драйвер, исключая фазовые сдвиги.
Микрошаг: как из одного шага сделать 16, 64 или 256 частей
Микрошаг реализуется электронно, через управление амплитудой тока с использованием широтно-импульсной модуляции. Драйвер плавно изменяет токи в обмотках по закону синуса и косинуса. Дробление шага до 1/16 существенно снижает угловую дискретность движения, сглаживает переходные процессы и перемещает частоту колебаний за пределы слышимого диапазона. Важно понимать, что микрошаг повышает разрешение и плавность, но не улучшает абсолютную точность, которая ограничена допусками сборки.
Режимы работы: от грубого перемещения до микрошага
Выбор режима коммутации определяет баланс между производительностью, акустическим комфортом и тепловым режимом. Каждый режим имеет свои физические ограничения и оптимальные сценарии применения.
Полношаговый режим — простой и надёжный, но трясучий
В полношаговом режиме ток подаётся поочерёдно в одну или две фазы с полным номинальным значением. Это обеспечивает максимальный крутящий момент и простейшую логику управления. Однако резкое переключение поля вызывает ударные нагрузки, что проявляется в виде вибраций. Режим эффективен в системах, где требуется максимальное усилие, а акустический комфорт не является приоритетом. Он часто используется при калибровке или в промышленных механизмах.
Полушаг и микрошаг — плавность ценой в 2-4 раза большего тока
Полушаговый режим комбинирует полношаговые и однофазные состояния, удваивая разрешение и снижая вибрации. Микрошаг устраняет этот недостаток за счёт плавного регулирования токов, однако требует от драйвера более высокой пропускной способности. Современные импульсные модули поддерживают заданный ток независимо от режима дробления, поэтому реальное увеличение тепловыделения минимально. Главной ценой становится требование к высокому напряжению питания и необходимость точной калибровки.
Ток удержания: двигатель неподвижен, но греется — норма или проблема?
При остановке вала драйвер продолжает подавать ток на обмотки. Это нормальное рабочее состояние, но оно сопровождается непрерывным выделением тепла. Длительное удержание при полном токе приводит к перегреву корпуса и деградации смазки. Решение заключается в настройке функции снижения тока или автоматического отключения питания при отсутствии команд. Современные контроллеры снижают ток до 30-50% от номинала в режиме простоя, что помогает сохранить усилие без риска теплового повреждения.
Типичные проблемы в станках и принтерах
Эксплуатация шаговых систем в реальных условиях неизбежно сталкивается с физическими ограничениями. Понимание причин этих явлений позволяет проектировать устойчивые системы с первой итерации.
Пропуск шага — почему манипулятор или каретка «уплывает»
Пропуск возникает, когда внешняя нагрузка или инерция превышают доступный динамический момент. В открытом контуре контроллер не получает информации о фактическом положении, поэтому ошибка накапливается линейно. Причины включают завышенные ускорения, недостаточное напряжение или механические заклинивания. Профилактика требует расчёта инерционного соотношения и использования плавных профилей ускорения. В критичных задачах внедрение систем с замкнутым контуром помогает автоматически компенсировать рассинхронизацию.
Резонанс на малых скоростях — вибрации, шум и потеря момента
Каждый шаговый двигатель обладает собственной механической резонансной частотой, обычно находящейся в диапазоне от 2 до 5 оборотов в секунду. При совпадении частоты шагов с этой зоной возникает резонанс, проявляющийся в виде сильных вибраций и падения момента. Явление вызвано взаимодействием электромагнитных переходных процессов и механической податливости. Устранение достигается переходом на микрошаг, механическим демпфированием через муфты или изменением профиля разгона.
Перегрев и потеря усилия — как не загубить проект неправильным драйвером
Неправильный выбор драйвера является одной из главных причин снижения ресурса. Модель с недостаточным токовым запасом не обеспечит номинальный момент, а устройство с низким рабочим напряжением не компенсирует индуктивное сопротивление. Частая ошибка заключается в использовании бюджетных модулей без токовой стабилизации. Правильный драйвер должен соответствовать индуктивности, иметь запас по напряжению и поддерживать современные алгоритмы ШИМ. Тепловой режим улучшается установкой радиаторов и организацией принудительного обдува.
Шаговый двигатель vs сервопривод: дуэль в реальных задачах
Выбор между шаговым двигателем и сервоприводом определяется соответствием характеристик конкретной задаче. Каждая технология обладает уникальным набором преимуществ.
Момент «с нуля» — где шаговый двигатель выигрывает без вариантов
Шаговый двигатель обеспечивает максимальный момент сразу при подаче питания, без необходимости раскрутки. В статическом режиме его удельный крутящий момент превышает показатели сопоставимых по габаритам сервоприводов. Это делает шаговые двигатели идеальными для удержания тяжёлых порталов и вертикальных осей. Простота запуска сокращает время ввода оборудования в эксплуатацию и снижает требования к квалификации персонала.
Скорость и КПД — где серва уходит в отрыв
Сервоприводы доминируют в задачах, требующих высоких скоростей вращения и постоянной мощности в широком диапазоне оборотов. Замкнутый контур с энкодером позволяет компенсировать возмущения в реальном времени. Серводвигатели не зависят от индуктивных ограничений так же сильно, и сохраняют номинальный момент вплоть до базовой скорости. КПД сервосистем выше, так как ток подаётся только при наличии нагрузки, что снижает энергопотребление. В высокоскоростных центрах эти преимущества делают сервоприводы безальтернативным решением.
Таблица выбора: бюджетный ЧПУ/3D-принтер — шаговик, тяжёлый станок — серва
Инженерный выбор строится на пересечении четырёх параметров: требуемой точности, рабочей скорости, массы подвижных частей и бюджета проекта. Для настольных ЧПУ и лабораторных автоматов, где нагрузки умеренны, шаговые системы обеспечивают оптимальное соотношение стоимости и качества. Для тяжёлых обрабатывающих центров и линий с непрерывным движением сервоприводы становятся экономически оправданными благодаря снижению простоев. Переход на серву обоснован, когда стоимость потери детали превышает разницу в цене приводов.
Сравнительная таблица шаговых двигателей и сервоприводов
| Параметр | Шаговый двигатель | Сервопривод |
|---|---|---|
| Принцип управления | Открытый контур (без обратной связи) | Замкнутый контур (энкодер/резольвер) |
| Точность позиционирования | 0,05-0,1 мм (зависит от механики) | 0,001-0,01 мм |
| Рабочая скорость | До 1000-1500 об/мин (оптимально до 500) | До 3000-6000 об/мин и выше |
| Момент на низких скоростях | Максимальный (100% от номинала) | Снижается, требует редуктора |
| Момент на высоких скоростях | Падает пропорционально скорости | Сохраняется до базовой скорости |
| Потребление энергии в покое | Высокое (ток удержания) | Минимальное (ток только при нагрузке) |
| КПД системы | 30-50% | 70-90% |
| Стоимость привода | Низкая ($10-50 за двигатель + $5-30 за драйвер) | Высокая ($200-1000+ за комплект) |
| Сложность настройки | Минимальная (потенциометр или DIP) | Требует настройки ПИД-регуляторов |
| Риск потери позиции | Есть при перегрузке (накапливается ошибка) | Отсутствует (коррекция в реальном времени) |
| Акустический комфорт | Низкий (вибрации, резонанс) | Высокий (плавное вращение) |
| Типичное применение | 3D-принтеры, настольные ЧПУ, дозаторы, плоттеры | Промышленные обрабатывающие центры, роботы, конвейеры |
| Требования к обслуживанию | Минимальные | Периодическая калибровка энкодера |
| Запас по моменту | Рекомендуется 30-50% | Достаточно 10-20% |
| Инерционное соотношение | Нагрузка ≤ 5-10× инерции ротора | Нагрузка ≤ 20-50× инерции ротора |
Практика: работа с шаговиком в реальном проекте
Теоретические знания трансформируются в рабочие решения только через корректный подбор компонентов и точную настройку. Каждый этап проектирования требует учёта взаимосвязи электрики, механики и программного управления.
Как подобрать двигатель для самодельного фрезера или 3D-принтера
Подбор начинается с расчёта требуемого крутящего момента на валу с учётом механического преимущества трансмиссии. Для ходовых винтов и ременных передач рассчитывается сила резания или ускорение массы каретки. К полученному значению добавляется коэффициент запаса 30-50% для компенсации трения и динамических нагрузок. Далее проверяется инерционное соотношение: момент инерции нагрузки не должен превышать момент инерции ротора более чем в 5-10 раз. Выбор напряжения питания производится на основе индуктивности обмоток: правилом является напряжение, равное произведению индуктивности в миллигенри на 32.
Типовые драйверы (A4988, TMC2209, DM542): что выбрать под свои задачи
A4988 остаётся базовым решением для бюджетных проектов, обеспечивая микрошаг до 1/16, но отличается высоким уровнем шума. TMC2209 представляет современное поколение драйверов с технологиями StealthChop для бесшумной работы и SpreadCycle для высокой динамики. Поддержка UART позволяет программно настраивать все параметры, что делает их стандартом для точных систем. DM542 рассчитаны на токи до 4,2 А и напряжения до 50 В, используют DIP-переключатели и применяются в тяжёлых станках, где приоритетом является надёжность.
Настройка тока микрошага и тока удержания — без этого проект не взлетит
Корректная настройка тока является критическим этапом ввода системы в эксплуатацию. Для модулей с аналоговой регулировкой используется формула Vref = I_max / 2,5, с обязательным измерением напряжения на тестовой точке. Цифровые драйверы конфигурируются через программное обеспечение, где задаются значения RMS-тока, что исключает погрешности ручного выставления. Ток удержания настраивается отдельно и обычно снижается до 40-60% от рабочего значения для минимизации нагрева в режиме простоя. Микрошаг выбирается исходя из механического разрешения системы: дробление 1/16 или 1/32 обычно достаточно для компенсации ступенчатости винтов.
Простой эксперимент на ардуино: вращение вала с фиксацией угла
Базовая верификация шаговой системы выполняется с помощью микроконтроллера, драйвера и источника питания. Контакты STEP и DIR подключаются к цифровым пинам платы, питание обмоток подаётся от стабилизированного источника. В коде реализуется генерация импульсов с заданной частотой, где каждый фронт сигнала вызывает один шаг в направлении, заданном логическим уровнем на DIR. Использование библиотек управления ускорением позволяет построить плавные профили движения, избегающие резких скачков тока. Эксперимент наглядно демонстрирует детерминированность открытого контура: подача фиксированного количества импульсов всегда приводит к одинаковому угловому положению вала.
Заключение: почему шаговики остаются в станкостроении и робототехнике
Эволюция шаговых двигателей не остановилась на достижении стандарта 1,8 градуса. Технология продолжает адаптироваться к требованиям современной автоматизации, сохраняя первоначальную философию: максимум предсказуемости при минимуме усложнений. В мире, где цифровое производство становится нормой, шаговый двигатель остаётся универсальным языком, на котором микроконтроллеры общаются с механикой.
Соотношение цена/точность — пока никто не переплюнул
Экономическая эффективность шаговых систем обусловлена масштабами производства, отлаженной цепочкой поставок и отсутствием дорогостоящей калибровочной периферии. Стоимость полного комплекта приводов для трёхосевого станка редко превышает стоимость одного серводвигателя, при этом точность позиционирования остаётся в пределах, достаточных для большинства инженерных задач. Массовое внедрение в потребительский сегмент создало устойчивый рынок запчастей, инструментов настройки и открытых программных решений, что снижает совокупную стоимость владения.
Предсказуемость и простота управления без энкодеров и ФАР
Открытый контур управления обеспечивает детерминированное поведение системы, которое критично для промышленной надёжности. Отсутствие необходимости в юстировке датчиков после замены двигателя, устойчивость к электромагнитным помехам в силовых цепях и возможность быстрого восстановления работы после аварийного отключения питания делают шаговые системы предпочтительными в средах с высокими требованиями к бесперебойности. Инженеры ценят возможность спроектировать систему один раз и быть уверенными в том, что она будет работать идентично на каждом экземпляре оборудования.
Где шаговый двигатель точно останется на ближайшие 10-15 лет
Шаговые двигатели сохранят доминирование в аддитивном производстве, лабораторной автоматизации, малых обрабатывающих центрах и медицинском оборудовании. Развитие драйверов с интеллектуальным подавлением резонанса, внедрение гибридных систем с простыми датчиками Холла и оптимизация магнитных материалов расширят рабочий диапазон. Даже при росте популярности сервоприводов, шаговый двигатель останется базовым решением для задач, где важны не предельные характеристики, а стабильность, доступность и инженерная прозрачность. В мире автоматизации он продолжит выполнять роль точного, надёжного и экономически обоснованного преобразователя цифровых команд в физическое движение.
FAQ: Ответы на частые вопросы
- В: Как найти пары обмоток, если потеряна документация на двигатель?
- О: Определить принадлежность проводов к фазам можно с помощью мультиметра в режиме прозвонки. Сопротивление между проводами одной обмотки будет низким (несколько Ом), между разными фазами — бесконечным. Если под рукой нет мультиметра, можно замкнуть любые два провода друг с другом и попытаться повернуть вал рукой. Если вал вращается с заметным сопротивлением (возникает электромагнитный стопор), значит, эти два провода относятся к одной фазе.
- В: Как правильно рассчитать блок питания для системы из нескольких шаговых двигателей?
- О: Напряжение блока питания выбирается исходя из максимального допустимого напряжения драйвера и требуемой скорости вращения (чем выше напряжение, тем быстрее нарастает ток в обмотках). Ток блока питания рассчитывается по формуле: *I_бп = (I_фазы × количество обмоток × 0,7) + 20% запаса*. Для стандартного двухфазного двигателя количество обмоток равно двум. Коэффициент 0,7 учитывает, что современные драйверы с ШИМ-регулированием не потребляют ток из сети непрерывно.
- В: Что произойдет с позиционированием, если внезапно отключится питание?
- О: Поскольку система работает в открытом контуре, контроллер «не знает» о фактическом положении вала после сбоя. При повторном включении координатная система будет потеряна. Для восстановления рабочего положения оборудование должно пройти процедуру калибровки нуля (homing) — движение до срабатывания концевых выключателей или датчиков, чтобы заново привязать программные координаты к физическому положению механики.
- В: Как правильно соединять вал двигателя с механикой, чтобы избежать люфтов и биения?
- О: Жесткое прямое соединение (например, винтом напрямую в вал) не рекомендуется из-за риска радиального биения, которое быстро разрушает подшипники двигателя. Необходимо использовать компенсационные муфты (жесткие с прорезями или упругие), которые компенсируют микро-несоосности. Для ременных передач важно соблюдать правильное натяжение, а для трапецеидальных и шарико-винтовых пар — применять гайки с устранением осевого люфта.
- В: Какие механические способы существуют для снижения шума, помимо настройки микрошага?
- О: Помимо электронного дробления шага, снизить акустический шум помогает правильная механика. К механическим способам относятся: использование резиновых виброразвязывающих прокладок под креплениями двигателя, обеспечение идеальной соосности валов, применение демпфирующих муфт, а также проверка баланса и натяжения ремней. Иногда помогает установка шкивов или шестерен с большим диаметром, что снижает требуемый крутящий момент на валу.
- В: В чем физическая разница подключения униполярного и биполярного двигателя?
- О: Униполярные двигатели имеют 5, 6 или 8 выводов и снабжены отводами от середины обмоток. Они проще в управлении (требуется менее сложная схема драйвера), но в каждый момент времени работает только половина катушки, что снижает крутящий момент. Биполярные двигатели имеют 4 вывода, требуют драйверов с H-мостом для реверса тока, но используют всю обмотку целиком, обеспечивая примерно на 40% больший момент при тех же габаритах. Большинство современных гибридных шаговых двигателей являются биполярными.
- В: Каков реальный срок службы шагового двигателя и что выходит из строя в первую очередь?
- О: Электромагнитная система (статор, ротор, магниты) практически вечна при соблюдении температурного режима. Слабым местом являются подшипники скольжения или качения и смазка. Двигатели с подшипниками скольжения (втулками) обычно имеют ресурс от 1 000 до 5 000 часов, тогда как модели с шариковыми подшипниками работают свыше 10 000 часов. Перегрев сверх 80–90°C приводит к деградации смазки и, в редких случаях, к постепенному размагничиванию постоянных магнитов ротора.
- В: Можно ли использовать шаговый двигатель в качестве генератора или тахогенератора?
- О: Да, при принудительном вращении вала в обмотках статора индуцируется ЭДС. На этом принципе работают некоторые простые системы обратной связи или аварийные тормозные механизмы (замыкание обмоток накоротко создает мощный тормозящий момент). Однако для точного измерения скорости или позиции он не подходит из-за нелинейной зависимости напряжения от скорости и влияния индуктивности, поэтому в качестве полноценного энкодера или тахогенератора не применяется.
Комментарии (0)
Пока нет комментариев. Будьте первым!