Что такое EtherCAT: основы, принцип работы и области применения
EtherCAT (Ethernet for Control Automation Technology) на сегодняшний день является одним из доминирующих промышленных протоколов реального времени. По данным EtherCAT Technology Group (ETG) на 2026 год, количество узлов устройств в мире превысило 10 миллионов, а технология используется более чем в 150 странах.
В отличие от стандартного Ethernet, который был создан для офисных сетей с приоритетом на пропускную способность, EtherCAT был спроектирован с приоритетом на детерминизм и низкий джиттер. Это делает его незаменимым для задач, где задержка в несколько микросекунд может привести к браку продукции или аварии оборудования.
Ключевые причины популярности в 2026 году:
- Открытость: Спецификация доступна бесплатно, нет лицензионных отчислений за использование стека.
- Производительность: Обработка 1000 узлов менее чем за 30 мкс.
- Гибкость: Свободная топология без необходимости дорогих коммутаторов.
- Безопасность: Встроенная поддержка функциональной безопасности (FSoE).
Базовые основы технологии EtherCAT
Определение и история создания (компания Beckhoff)
EtherCAT был разработан немецкой компанией Beckhoff Automation и впервые представлен в 2003 году. Изначально технология создавалась как решение внутренних задач компании для повышения производительности своих ПЛК, но быстро вышла на рынок благодаря своей эффективности.
- 2003: Первая публикация спецификации.
- 2007: Включение в стандарты IEC 61158 (Тип 12) и EN 50325-14.
- 2010-2020: Массовое внедрение в станкостроение и робототехнику, появление сторонних мастеров (Omron, Panasonic, Delta).
- 2021-2026: Развитие стандартов EtherCAT G (1 Гбит/с и 10 Гбит/с) для задач машинного зрения и больших данных, интеграция концепций TSN (Time-Sensitive Networking).
В отличие от многих закрытых решений (например, ранних версий PROFINET или Sercos), спецификация EtherCAT полностью открыта. Однако, чтобы гарантировать совместимость, все производители оборудования обязаны проходить сертификацию в ETG (EtherCAT Technology Group). Устройство, прошедшее тесты, получает логотип EtherCAT и уникальный Vendor ID.
Ключевое отличие от классического Ethernet (обработка «на лету»)
В традиционном Ethernet (TCP/IP) каждый узел сети (коммутатор или устройство) принимает кадр целиком в буфер, анализирует заголовок, проверяет контрольную сумму (FCS) и только затем пересылает дальше. Это создает накопительную задержку (store-and-forward).
EtherCAT использует принцип Processing On the Fly (обработка на лету):
- Аппаратная реализация: Обработка кадра происходит на уровне FPGA или специализированного ASIC (EtherCAT Slave Controller — ESC), а не процессора устройства.
- Задержка: Время задержки прохождения кадра через узел составляет менее 1 мкс (фактически около 30-60 нс на бит), что сопоставимо с временем распространения сигнала по кабелю.
- Эффект: Сеть ведет себя как единая последовательная шина, несмотря на физическую структуру Ethernet.
Топология сети: звезда, линия, дерево и кольцо
EtherCAT поддерживает гибкое построение сети, что критично для машиностроения:
- Линейная (Daisy-Chain): Самая распространенная. Устройства подключаются последовательно (Port IN -> Port OUT). Минимизирует длину кабеля и количество разъемов.
- Древовидная: Создается через EtherCAT Branch Couplers (разветвители). Позволяет подводить кабель к разным частям машины без возврата к контроллеру.
- Звёздная: Реализуется через стандартные Ethernet-коммутаторы. Важно: Использование обычных коммутаторов нарушает детерминизм, поэтому применяется только для не критичных к времени задач или диагностики. Для сохранения реального времени используются специальные EtherCAT Switches.
- Кольцевая (Redundancy): Обеспечивает кабельное резервирование. Последний узел замыкает кольцо на Master. При обрыве кабеля в любом месте сеть автоматически перенаправляет трафик в обратном направлении («обратный ход»), сохраняя работоспособность всех узлов. Время переключения при обрыве составляет менее 100 мкс.
Основные возможности и производительность
Скорость передачи данных и время цикла
Физический уровень соответствует 100BASE-TX (100 Мбит/с).
- Эффективная пропускная способность: Благодаря обработке на лету, полезная нагрузка достигает более 90% полосы пропускания (в стандартном Ethernet часто менее 50% из-за накладных расходов).
- Время цикла:
- Для 100 узлов I/O: ~100 мкс.
- Для 1000 узлов I/O: ~300 мкс (зависит от конфигурации PDO).
- Минимальный возможный цикл: менее 10 мкс для простых задач.
- Сравнение: Аналогичная задача на классическом polling-протоколе (Modbus) заняла бы 50–100 мс.
Высокая синхронизация (Distributed Clocks — DC)
Для задач многоосевого управления (синхронизация двигателей) используется механизм Distributed Clocks.
- Референс: Одно устройство в сети (обычно первый Slave или Master) выбирается как источник времени (Reference Clock).
- Калибровка: Master измеряет задержки распространения сигнала до каждого узла.
- Компенсация: Каждому Slave сообщается смещение его часов относительно референса.
- Результат: Все устройства выполняют действия (например, выборку данных АЦП или обновление ШИМ) одновременно с джиттером менее 1 мкс (на практике часто менее 500 нс).
- Режимы синхронизации:
- Free Run: Slave работает по своему внутреннему такту.
- SM Sync: Синхронизация по прерыванию от SyncManager.
- DC Sync: Аппаратная синхронизация по сигналу SYNC0/SYNC1 от ESC.
Работа с большим количеством устройств
Адресное пространство использует 16-битную нумерацию, что теоретически позволяет подключить до 65 535 устройств.
- Ограничения: На практике лимит определяется:
- Длиной кабеля: Максимум 100 м между узлами (без повторителей). Общая длина сегмента может достигать нескольких километров.
- Падением напряжения: Если используется питание 24В через разъемы (не EtherCAT P), нужно учитывать ток потребления всех модулей.
- Производительностью Master: Контроллер должен успевать обрабатывать прерывания и формировать кадры в рамках заданного цикла.
Расширенные функции: Безопасность и Питание
EtherCAT Safety (FSoE — FailSafe over EtherCAT)
Это одна из ключевых фишек, выделяющих EtherCAT на фоне конкурентов.
- Принцип «Черного канала» (Black Channel): Протокол безопасности работает поверх стандартного EtherCAT. Безопасные данные инкапсулируются в стандартные кадры.
- Сертификация: Соответствует IEC 61508 (SIL 3) и ISO 13849 (Cat. 4 / PLe).
- Как работает: Используется отдельный идентификатор типа кадра. Безопасные данные защищены контрольными суммами, номерами последовательности и таймаутами. Если стандартный кадр теряется, безопасность также реагирует на это.
- Преимущество: Не нужна отдельная проводка для аварийных цепей (кнопки стоп, световые завесы). Всё передается по одному кабелю EtherCAT.
EtherCAT P (Power over EtherCAT)
Технология, позволяющая передавать питание и данные по одному 4-жильному кабелю.
- Напряжение: 24 В постоянного тока (стандарт) или 48 В (для большей мощности).
- Ток: До 1 А на контакт (суммарно до 3-4 А на разъем в зависимости от версии).
- Применение: Идеально для распределенной периферии (датчики, небольшие клапаны, IO-модули), где не хочется тянуть отдельные силовые кабели.
- Разъемы: Используются специальные 4-контактные разъемы M8/M12 или RJ45 с ключом, чтобы избежать подключения стандартного Ethernet оборудования к напряжению 24В (защита от дурака).
EtherCAT G (Gigabit)
Ответ на растущие потребности в передаче больших объемов данных (видеокамеры, лидары, сложная диагностика).
- EtherCAT G10: 1 Гбит/с.
- EtherCAT G50: 5 Гбит/с.
- EtherCAT G100: 10 Гбит/с.
- Совместимость: Устройства EtherCAT G могут работать в одной сети с устройствами 100 Мбит/с через специальные шлюзы или коммутаторы, обеспечивая высокую пропускную способность там, где это нужно, и сохраняя детерминизм там, где важно управление.
Как работает EtherCAT: главный принцип
Структура EtherCAT-кадра (Telegram)
Для глубокого понимания важно знать структуру данных. EtherCAT-кадр инкапсулируется в стандартный кадр Ethernet.
- Заголовок Ethernet: Содержит MAC-адреса (Destination MAC обычно широковещательный или конкретный порт мастера).
- EtherType: Значение 0x88A4 идентифицирует кадр как EtherCAT.
- Заголовок EtherCAT: Содержит длину данных и тип кадра.
- Подтелеграммы (Sub-telegrams): Один кадр может содержать до 14 подтелеграмм. Каждая подтелеграмма адресована конкретной группе устройств или данным.
- Логическая адресация: Доступ к данным по смещению в памяти (не зависит от физического положения).
- Физическая адресация: Доступ к конкретному узлу по порядку в цепи (используется при инициализации).
- Адресация по блокам: Групповая запись/чтение.
- Working Counter (WKC): Критический параметр. Каждый Slave, успешно обработавший данные, инкрементирует счетчик. Master проверяет ожидаемое значение WKC. Если оно не совпадает — значит, одно из устройств не ответило (ошибка связи, отключено питание, сбой ESC).
- FCS (Frame Check Sequence): Контрольная сумма в конце кадра Ethernet.
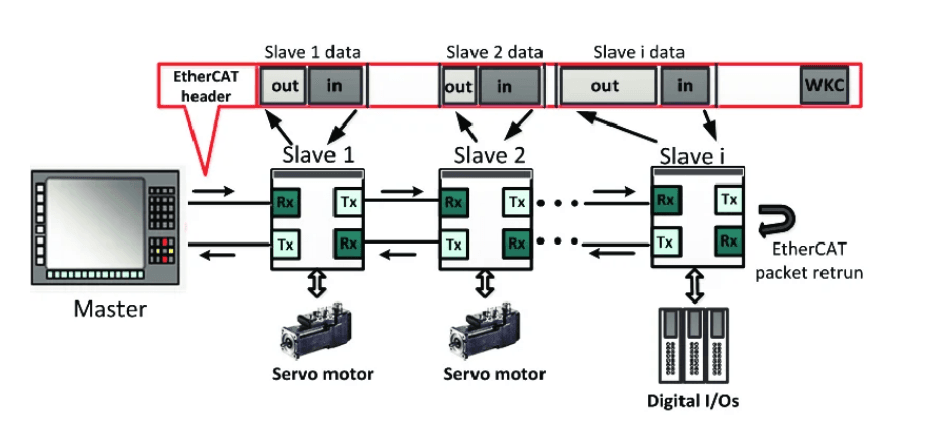
Механизм чтения и вставки данных «на лету» (Processing On the Fly)
В каждом Slave-устройстве реализован аппаратный блок FMMU (Fieldbus Memory Management Unit) и SyncManager.
- Входные данные (Input): Когда кадр проходит через чип ESC, FMMU сравнивает адрес в подтелеграмме со своим адресным пространством. При совпадении устройство считывает данные из кадра в свои внутренние регистры (Process Data Objects — PDO).
- Выходные данные (Output): Устройство записывает свои данные (например, состояние датчика) в свободные байты проходящего кадра.
- Непрерывность: Кадр не останавливается. Задержка на обработку одного узла составляет менее 1 мкс. Это делает технологию практически нечувствительной к количеству устройств в цепи (до 65535).
Роль Master-устройства и Slave-устройств
-
Master (ПК, ПЛК, встроенный контроллер)
- Единственное устройство, инициирующее обмен данными.
- Управляет состоянием машины (State Machine).
- Распределяет такты синхронизации (Distributed Clocks).
- Может быть реализован на ПК (Windows/Linux), ПЛК (Beckhoff CX/CP, Omron NJ/NX, Siemens через шлюзы) или встраиваемых контроллерах.
-
Slave (модули ввода-вывода, приводы, датчики)
- Содержит ESC (EtherCAT Slave Controller). Это может быть отдельный чип (например, ET1100, ET2000) или программная реализация (Software Slave на процессоре, реже).
- Не генерирует трафик самостоятельно.
- Описывается файлом ESI (EtherCAT Slave Information) в формате XML, который содержит информацию о регистрах, PDO, SDO и параметрах.
Машина состояний EtherCAT (State Machine)
Для корректной работы сеть проходит строгую последовательность состояний (контролируется через регистр AL Status):
- Init: Базовая инициализация, загрузка конфигурации.
- Pre-Operational: Настройка параметров, проверка связи, но обмен процессными данными (PDO) еще не идет.
- Safe-Operational: Входы активны, данные читаются, но выходы заблокированы (безопасное состояние).
- Operational: Полноценный цикл обмена данными (входы и выходы активны). Переход в состояние Operational возможен только если все подключенные Slave готовы.
Где применяется EtherCAT: реальные примеры
Станкостроение
ЧПУ-фрезерные и токарные станки, системы автоматической подачи и смены инструмента. EtherCAT обеспечивает синхронное управление 5–12 осями, высокочастотный обмен с датчиками положения и мгновенную реакцию на аварийные сигналы.
Робототехника
Промышленные и коллаборативные роботы, дельта-манипуляторы, AGV/AMR. Низкие задержки и DC-синхронизация позволяют реализовывать сложные траектории, компенсировать вибрации и обеспечивать безопасное взаимодействие с человеком.
Испытательные стенды и сбор данных
HIL-тестирование, виброанализ, тензометрия, аэрокосмические и автомобильные стенды. EtherCAT способен передавать сотни аналоговых каналов с частотой опроса до 10 кГц и выше без потери детерминизма.
Автоматизация зданий и альтернативные ниши
Системы ОВКВ, управление освещением, лифтовое оборудование, ветрогенераторы и солнечные трекеры. В этих областях EtherCAT ценится за масштабируемость, простоту прокладки кабеля и возможность интеграции с SCADA и IoT-платформами.
Сравнение EtherCAT с другими промышленными шинами
| Характеристика | EtherCAT | PROFINET IRT | Ethernet/IP | Modbus TCP |
|---|---|---|---|---|
| Разработчик | Beckhoff (ETG) | Siemens (PI) | ODVA (Rockwell) | Modbus-IDA |
| Принцип работы | On-the-Fly (аппаратный) | Коммутаторы + приоритеты | CIP поверх TCP/UDP | Запрос-Ответ (TCP) |
| Детерминизм | Жёсткий (менее 1 мкс джиттер) | Жёсткий (требует спец. свитчей) | Мягкий (зависит от сети) | Отсутствует |
| Типичный цикл | 100 мкс – 1 мс | 250 мкс – 4 мс | 1 мс – 10 мс | 10 мс – 100 мс |
| Топология | Линия, Дерево, Кольцо | Звезда, Линия | Звезда | Звезда |
| Безопасность | FSoE (встроено) | PROFIsafe | CIP Safety | Нет (надстройка) |
| Стоимость внедрения | Низкая (кабель, нет свитчей) | Средняя/Высокая (свитчи) | Средняя | Низкая |
| Экосистема | Огромная (2000+ вендоров) | Огромная (доминирует в EU) | Огромная (доминирует в US) | Универсальная |
Ключевые выводы сравнения:
EtherCAT vs PROFINET
PROFINET (Siemens) использует стандартные Ethernet-коммутаторы и работает в режимах RT/IRT. Он обладает широкой экосистемой, но требует более сложной настройки и имеет большие задержки (обычно >250 мкс). EtherCAT не нуждается в коммутаторах, обеспечивает циклы <100 мкс и проще в разводке, но экосистема PLC-совместимых инструментов у PROFINET исторически шире в ряде отраслей.
EtherCAT vs Ethernet/IP
Ethernet/IP базируется на стеке CIP поверх TCP/UDP, что удобно для интеграции с IT-инфраструктурой, но добавляет накладные расходы и снижает детерминизм. Циклы обычно измеряются миллисекундами. EtherCAT работает на уровне Ethernet-кадра без TCP/IP, что даёт жёсткое реальное время и минимальный джиттер, но требует более строгой сетевой дисциплины.
EtherCAT vs Modbus RTU/TCP
Modbus – протокол с задержкой и ограниченной пропускной способностью. Он подходит для простых задач мониторинга, но не для высокоскоростного управления. EtherCAT превосходит Modbus по всем параметрам реального времени, сохраняя при этом простоту адресации и конфигурирования.
Преимущества и недостатки EtherCAT
Плюсы: детерминизм, скорость, низкая стоимость кабеля (CAT5e)
- Жёсткий детерминизм и субмиллисекундные циклы обмена
- Обработка «на лету» минимизирует задержки независимо от количества узлов
- Использование стандартных экранированных кабелей CAT5e/CAT6 и разъёмов RJ45/M12 снижает стоимость инфраструктуры
- Открытый стандарт, отсутствие лицензионных отчислений, сертификация ETG гарантирует совместимость
- Встроенная поддержка безопасности (FSoE – FailSafe over EtherCAT)
Минусы: сложность отладки, требовательность к мастеру
- Диагностика требует специализированных инструментов (анализаторы, ПО с поддержкой ESI/PDO-маппинга)
- Master должен обладать достаточной вычислительной мощностью и поддерживать стек реального времени
- Проектирование сети требует учёта длин сегментов, заземления, экранирования и топологии
- Меньшая «plug-and-play» гибкость по сравнению с некоторыми TCP-based протоколами
Практический минимум: как начать работать с EtherCAT
Какое оборудование нужно (Master и Slave)
- Master: промышленный ПК с PCIe EtherCAT-картой, ПЛК с портом EtherCAT (Beckhoff, Wago, Omron, и др.) или одноплатный компьютер с Linux + программный стек.
- Slave: любое сертифицированное устройство (модули I/O, приводы, датчики) с ESI-файлом от производителя.
- Кабельная сеть: экранированные промышленные патч-корды, разъёмы RJ45 или M12, терминирующие заглушки (при необходимости).
Бесплатные инструменты и стеки
- SOEM (Simple Open EtherCAT Master) – открытый кроссплатформенный стек для Linux/Windows
- IgH EtherCAT Master – модуль ядра Linux с поддержкой DC и высокой производительностью
- TwinCAT 3 – полнофункциональная среда разработки от Beckhoff (бесплатный runtime с ограничениями по циклам)
- EtherCAT Configurator / Wireshark с плагином – для анализа трафика и отладки
- ETG.1000 – спецификация и база ESI-файлов для всех сертифицированных устройств
Пример простой конфигурации из двух устройств
- Подключите Master (например, ПК с Linux + SOEM) к Slave 1 (дискретный ввод EL1008) и последовательно к Slave 2 (аналоговый ввод EL3102) кабелем CAT5e.
- Загрузите ESI-файлы устройств в конфигуратор.
- Назначьте логические адреса, выполните сканирование сети.
- Сопоставьте PDO: привяжите входы/выходы к переменным приложения, включите Distributed Clocks (если требуется синхронизация).
- Запустите master-стек, проверьте статус
AL(Application Layer), убедитесь в отсутствии ошибок связи. - Мониторьте данные через диагностический интерфейс или лог приложения.
Обзор популярных Slave-устройств и вендоров
Хотя Beckhoff является создателем, экосистема включает сотни производителей.
Ведущие производители (2026)
- Beckhoff Automation: Самый широкий ассортимент (IO, приводы, ПК).
- Omron: Серии NX/NJ, отличная интеграция с роботами.
- Panasonic: Приводы Minas, популярны в упаковке.
- Delta Electronics: Бюджетные решения для Азии и СНГ.
- Inovance: Быстрорастущий китайский вендор с хорошей поддержкой.
- Wago: Модульные системы ввода-вывода.
- Phoenix Contact: Высоконадежные модули для процессовой автоматизации.
Типы модулей
- Дискретные (EL1xxx/EL2xxx): Цифровые входы/выходы (24В). Есть модули с диагностикой КЗ и обрыва.
- Аналоговые (EL3xxx/EL4xxx): Токовые (0-20мА), напряженческие (0-10В), термопары. Разрешение до 24 бит.
- Специализированные:
- Шаговые двигатели: Встроенные драйверы (EL70xx).
- Энкодеры: Поддержка SSI, BiSS, HIPERFACE.
- Коммуникационные шлюзы: Преобразование EtherCAT в Profinet, Modbus, CANopen.
Диагностика и устранение неисправностей
Световая индикация (LED)
На каждом устройстве EtherCAT обычно есть два светодихода:
- RUN (Зеленый):
- Выкл: Нет питания или сбой ESC.
- Мигает: Инициализация.
- Горит: Нормальная работа (Operational).
- ERR (Красный):
- Выкл: Ошибок нет.
- Мигает: Ошибка связи (потеря кадров, неверный WKC).
- Горит: Критическая ошибка (сбой конфигурации, перегрев).
Типичные ошибки и решения
- Ошибка WKC (Working Counter):
- Причина: Одно из устройств не ответило.
- Решение: Проверить питание Slave, целостность кабеля, соответствие версии прошивки устройства и ESI-файла.
- Ошибка синхронизации (DC Sync):
- Причина: Джиттер слишком велик, устройство не успевает обработать данные.
- Решение: Увеличить время цикла, проверить нагрузку на процессор Master, проверить экранирование кабеля.
- Устройство не обнаруживается:
- Причина: Неверный порядок подключения (если используется физическая адресация), обрыв кабеля до устройства.
- Решение: Проверить линк на предыдущем устройстве.
Заключение и перспективы развития
EtherCAT остается одним из наиболее сбалансированных решений для задач, где скорость, синхронность и масштабируемость выходят на первый план. Открытость стандарта, аппаратная оптимизация и постоянная поддержка ETG обеспечивают его устойчивое положение в промышленности.
Тренды развития на 2026–2030 годы:
- Интеграция с TSN: EtherCAT over TSN позволит объединить сеть реального времени и стандартный IT-трафик в одном кабеле без потери детерминизма, используя стандартные сетевые карты.
- Рост EtherCAT G: С увеличением сложности задач (ИИ на краю сети, 3D-видео) пропускной способности 100 Мбит/с может не хватать. Gigabit версии займут нишу высоконагруженных узлов.
- Предиктивная аналитика: Данные телеметрии с приводов и модулей через EtherCAT будут напрямую передаваться в облако для анализа износа и предотвращения аварий (Condition Monitoring).
- Single Pair Ethernet (SPE): Ожидается адаптация стандартов для передачи данных и питания по одной паре проводов на большие расстояния, что снизит вес кабельных трасс в робототехнике.
Несмотря на появление новых протоколов, EtherCAT демонстрирует зрелость, надёжность и готовность к вызовам Индустрии 4.0, оставаясь предпочтительным выбором для инженеров, которым требуется предсказуемое реальное время без излишней сложности инфраструктуры.
FAQ: Ответы на частые вопросы
- В: Можно ли использовать обычный офисный сетевой кабель для EtherCAT?
- О: Технически да, если это витая пара CAT5e. Однако в промышленности рекомендуется использовать промышленные кабели с двойным экранированием и маслостойкой изоляцией, чтобы избежать помех и механических повреждений.
- В: Сколько устройств можно подключить к одному порту Master?
- О: Теоретически до 65535. Практически ограничение накладывает время цикла обмена и суммарная задержка распространения сигнала по сегменту. Обычно в одном сегменте используют до 100–200 устройств для сохранения быстродействия.
- В: Совместим ли EtherCAT с обычным Ethernet?
- О: На физическом уровне да (разъемы, кабель). На программном — нет. Обычный ПК не поймёт кадры EtherCAT без установки специального драйвера (Master стека). Однако кадры EtherCAT могут проходить через стандартные коммутаторы (как прозрачный трафик), но это ухудшит детерминизм.
- В: Что лучше: EtherCAT или PROFINET?
- О: Для станков и робототехники часто предпочитают EtherCAT из-за простоты разводки и скорости. Для заводских сетей с оборудованием Siemens чаще выбирают PROFINET. Выбор зависит от парка оборудования и задач.
- В: Нужен ли терминальный резистор в сети EtherCAT?
- О: Нет, в отличие от некоторых полевых шин (например, Profibus DP), EtherCAT не требует терминирования линии на концах.
- В: Какие требования предъявляются к операционной системе Master-контроллера?
- О: Master EtherCAT требует ОС реального времени или, как минимум, ядра с поддержкой high-resolution timer и вытесняющей планировки. На практике используют TwinCAT (Windows с RT-расширением), Linux с PREEMPT_RT, RTX, Integrity или специализированные RTOS (VxWorks, QNX). Стандартный Windows без RT-надстройки даёт джиттер до нескольких миллисекунд, что делает невозможным цикл обмена короче 1–2 мс и неприменимо для задач синхронного движения.
- В: Как выполняется диагностика сети EtherCAT без остановки производства?
- О: Для онлайн-диагностики применяют аппаратные анализаторы (например, ETG-сертифицированные tap-модули), которые пассивно снимают копию кадра без разрыва линии. Программные средства (TwinCAT Scope, Wireshark с плагином EtherCAT) позволяют отслеживать счетчики Working Counter (WKC), выявлять потерянные кадры и измерять джиттер Distributed Clocks в реальном времени. Дополнительно каждый Slave хранит регистры SII (Slave Information Interface), откуда считывается температура микросхемы ESC, состояние порта и история ошибок — это даёт превентивное обнаружение деградации кабеля или разъёма.
- В: Что такое CoE и SoE и зачем они нужны поверх EtherCAT?
- О: CoE (CANopen over EtherCAT) и SoE (Servo drive profile over EtherCAT) — это прикладные профили, работающие поверх транспортного уровня EtherCAT. CoE переносит объектную модель CANopen (словарь объектов, PDO/SDO) и используется для параметрирования датчиков, клапанов и IO-модулей. SoE описывает стандартный набор команд и IDN-параметров для сервоприводов: управление контуром положения, скорости и момента, автонастройка, осциллографирование. Благодаря разделению транспорта и прикладного уровня одно и то же физическое кольцо EtherCAT одновременно обслуживает и дискретную периферию (по CoE), и сервооси (по SoE), и функции безопасности (по FSoE).
- В: Какие меры кибербезопасности реализованы в EtherCAT?
- О: Базовый стек EtherCAT не шифрует трафик, поскольку приоритетом является быстродействие. Для защиты применяют сегментацию сети через шлюзы с функциями firewall, MAC-фильтрацию на уровне Master, а также развиваемую спецификацию EtherCAT Security, добавляющую механизмы аутентификации узлов и защиту конфигурации. Для критичных инфраструктур используют отдельный контур управления, физически изолированный от корпоративной IT-сети, а доступ к параметрированию осуществляется через прокси-сервер с журналом аудита.
- В: Можно ли перевести существующую линию с Profibus или Modbus на EtherCAT без замены полевых устройств?
- О: Да, через шлюзы (gateway). Например, Profibus-EtherCAT master gateway позволяет подключить старые Profibus-DP slave'ы как прозрачные устройства в сеть EtherCAT: Master видит их как стандартные EtherCAT-терминалы с PDO-обменом. Аналогично работают шлюзы Modbus TCP–EtherCAT, DeviceNet–EtherCAT и AS-i–EtherCAT. Это даёт возможность модернизировать систему управления поэтапно, сохраняя инвестиции в полевую периферию, при этом получая субмиллисекундный цикл и синхронизацию Distributed Clocks на уровне новой части линии.
- В: Существует ли беспроводная версия EtherCAT?
- О: Да, развивающаяся спецификация EtherCAT over Wireless (в рамках ETG) позволяет передавать процессные данные по Wi-Fi 6 и 5G для мобильных применений. Однако беспроводные участки применяются только для не критичных к джиттеру задач: сбор данных с мобильных тележек AGV, диагностика, HMI-панели. Для синхронного движения осей и функций безопасности беспроводные сегменты не используются, поскольку недетерминированность радиоэфира даёт джиттер в десятки миллисекунд, что превышает допуски FSoE и Distributed Clocks.
- В: Совместим ли EtherCAT с технологией TSN (Time-Sensitive Networking)?
- О: EtherCAT и TSN концептуально дополняют друг друга. TSN (IEEE 802.1) стандартизирует механизмы детерминизма на уровне обычного Ethernet: time-aware shaper, frame preemption, 802.1AS clock sync. Beckhoff и другие члены ETG участвуют в интеграции, чтобы кадры EtherCAT могли использовать TSN-очереди на стандартных коммутаторах, сохраняя субмикросекундный джиттер. Это открывает путь к единой сети, где трафик реального времени EtherCAT и стандартный IT-трафик сосуществуют на одном кабеле без взаимных помех.
- В: Какие особенности монтажа кабеля EtherCAT в условиях сильных электромагнитных помех?
- О: В зонах с частотными преобразователями, сварочным оборудованием и силовыми кабелями рекомендуется прокладывать кабель EtherCAT на расстоянии не менее 200 мм от силовых линий, используя разделительные металлические лотки с заземлением. Экран кабеля подключается к корпусу разъёма на 360° (через конусные пружинные зажимы, а не «косичку»), что обеспечивает затухание ВЧ-помех выше 30 дБ. Для подвижных частей (кабельные цепи, роботы) применяют специальные chain-flex кабели с медным плетёным экраном и радиусом изгиба от 7,5 диаметров кабеля.
Комментарии (1)
Good